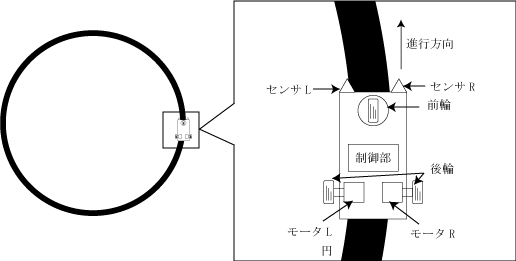
図のような黒色で描かれた円に沿って車が走るように, 左右の後輪に独立に取り付けられたモータL及びRの回転速度を制御する。センサL及びRは反射型光セン サであり,センサが黒色に掛かる比率が大きいと出力値が小さくなり,黒色に掛かる比率が小さいと出力値が大きくなる。この車を円に沿って走行させるためのモー タ回転速度の制御方法として,適切なものはどれか。ここで, 二つのセンサの出力値が一致するときには,二つのモータの回転速度を初期値に戻すものとする。
| センサL出力値>センサR出力値 のとき |
センサL出力値<センサR出力値 のとき |
|||
| モータL 回転速度 |
モータR 回転速度 |
モータL 回転速度 |
モータR 回転速度 |
|
| ア | 上げる | 下げる | 上げる | 下げる |
| イ | 上げる | 下げる | 下げる | 上げる |
| ウ | 下げる | 上げる | 上げる | 下げる |
| エ | 下げる | 上げる | 下げる | 上げる |
解説を読む
正解:イ
解説:
モータLとモータRの回転速度の関係はモータLの回転速度が下がり、モータRの回転速度が上がることで左方向へ進行します。逆にモータLの回転速度が上がり、モータRの回転速度が下がると右方向へ進行します。
また、センサは黒色に掛かる比率が大きくなると出力値が小さくなり、黒色に掛かる比率が小さくなると出力値が大きくなると問題文にあります。これはセンサL、センサRの2つの値を比較した際に値の小さい方向に黒い線が引かれていることを意味します。すなわち2つのセンサを比較し値の小さい方のモータをより高速に回せば良い事になります。
センサL出力値>センサR出力値のときは右に進行したいのでモータLの回転を上げ、モータRの回転を下げます。
センサL出力値<センサR出力値のときは左に進行したいのでモータLの回転を下げ、モータRの回転を上げます。
上記条件に合致するイが正解です。
解説を閉じる

コメント